混合导航
道道通根据自身导航产品的特点、优势,以及对客户群体的深入了解和分析,在传统导航的基础上,将在线导航服务信息、在线导航服务功能融合到传统导航中,打造出新形态的互联网化导航产品—道道通混合导航。依托互联网强大的信息资源,以及信息传播快、传播广、大数据整合提升等优势,将传统产品互联网化让企业原有的产品提升到一个新的高度。
离线
地图
地图
混
合
导
航
合
导
航
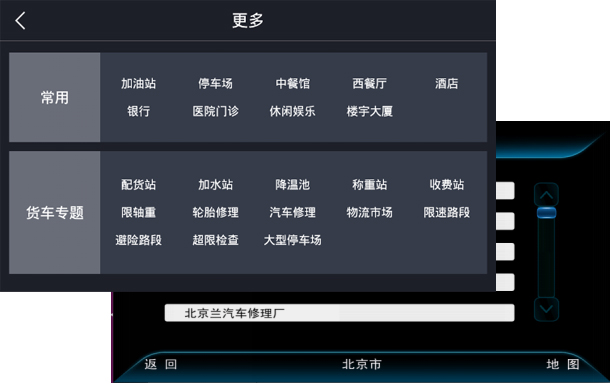
在线
功能
功能
+
+